Tehnologie12 mai 2026
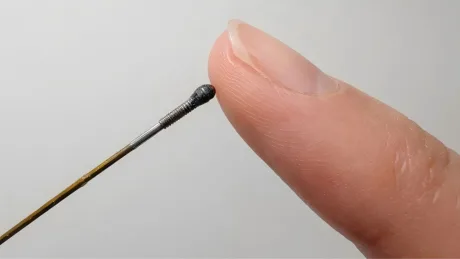
Cercetători de la Shanghai Jiao Tong University au dezvoltat un senzor optic de 1,7 mm pentru „simțul tactil” al roboților chirurgicali - măsoară forță și torsiune în timp real și poate detecta structuri ascunse sub țesut moale
Un senzor optic de 1,7 mm, dezvoltat în China, ar putea reduce riscul de accidente în chirurgia robotică prin „simțul tactil” în timp real , o limitare majoră a sistemelor actuale bazate mai ales pe imagistică, potrivit Interesting Engineering . Dispozitivul, realizat de o echipă de la Shanghai Jiao Tong University , este descris ca fiind „de mărimea unui bob de orez” și poate măsura forță, presiune și torsiune (răsucire) în toate direcțiile folosind lumină, nu componente electronice. Miza operațională este integrarea în instrumente medicale miniaturale, unde senzorii existenți sunt adesea prea voluminoși sau prea complicați pentru a fi montați. De ce contează: chirurgia robotică „vede”, dar nu „simte” În intervențiile minim invazive, roboții operează în spații foarte înguste (de exemplu, în interiorul ochiului sau pe trasee chirurgicale înguste), iar lipsa feedbackului tactil poate face mai dificilă detectarea contactului nesigur cu țesuturi sensibile. Liderul echipei, Jianlong Yang, explică limitarea sistemelor actuale: „Deși sistemele moderne de imagistică pot arăta structurile clar, ele nu oferă informații despre interacțiunea fizică, precum forța sau torsiunea, iar senzorii de forță existenți sunt adesea prea voluminoși sau prea complecși pentru a încăpea în instrumente miniaturale.” Cum funcționează senzorul: lumină, fibră optică și analiză bazată pe date Arhitectura propusă folosește: o fibră optică cu un vârf din elastomer (material moale, elastic), care se deformează la atingere; deformarea schimbă modul în care se propagă lumina în interiorul senzorului; un „mănunchi” coerent de fibre transportă tiparul de lumină către o cameră; sistemul analizează imaginea captată prin metode „bazate pe date” pentru a calcula forța și torsiunea în toate direcțiile. Cercetătorii susțin că această abordare evită complexitatea cablării întâlnită la senzorii miniaturali convenționali. Yang compară soluția cu sistemele de tip FBG (fiber Bragg grating – o tehnologie care folosește mai multe elemente de detecție în fibră optică pentru a separa componentele de forță): „Nu măsurăm forța bucată cu bucată, ci detectăm starea generală a contactului într-un singur pas.” Teste: măsurători repetabile și detectarea unor „tumori” simulate În testele de laborator, echipa a evaluat senzorul în condiții controlate, cu forțe și mișcări de torsiune cunoscute. Rezultatul raportat: măsurători repetabile și histerezis redus (adică citiri consistente la încărcare și descărcare). Separat, cercetătorii au folosit modele din gelatină în care au introdus obiecte sferice rigide pentru a imita structuri de tip tumoral ascunse sub țesut. Senzorul ar fi reușit să detecteze și să localizeze aceste structuri. Ce urmează: condiții pentru utilizare comercială Înainte de o eventuală comercializare, echipa spune că vizează: îmbunătățirea consistenței în fabricație; reducerea nevoilor de calibrare; integrarea în sisteme robotice medicale și industriale pentru teste pe termen lung, în condiții reale de operare; „împachetarea” tehnologiei în sisteme compacte, ușor de folosit de clinicieni și ingineri. Studiul a fost publicat în revista științifică Optica . [...]